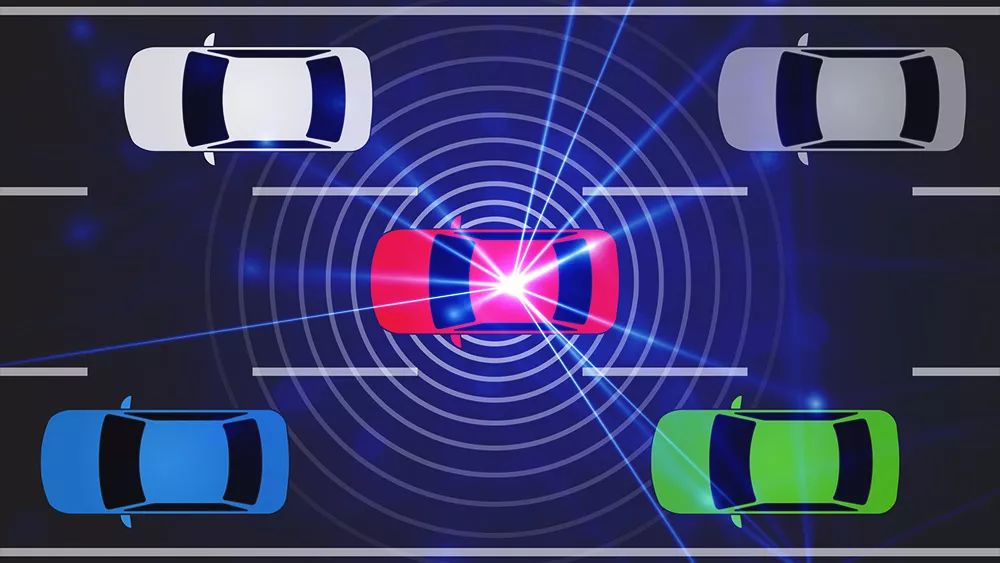
隨著汽車的智能化程度越來越高,車載雷達越來越成為了汽車上的一個必備配置。那么汽車雷達有哪些類型?汽車雷達不響了該怎么辦?
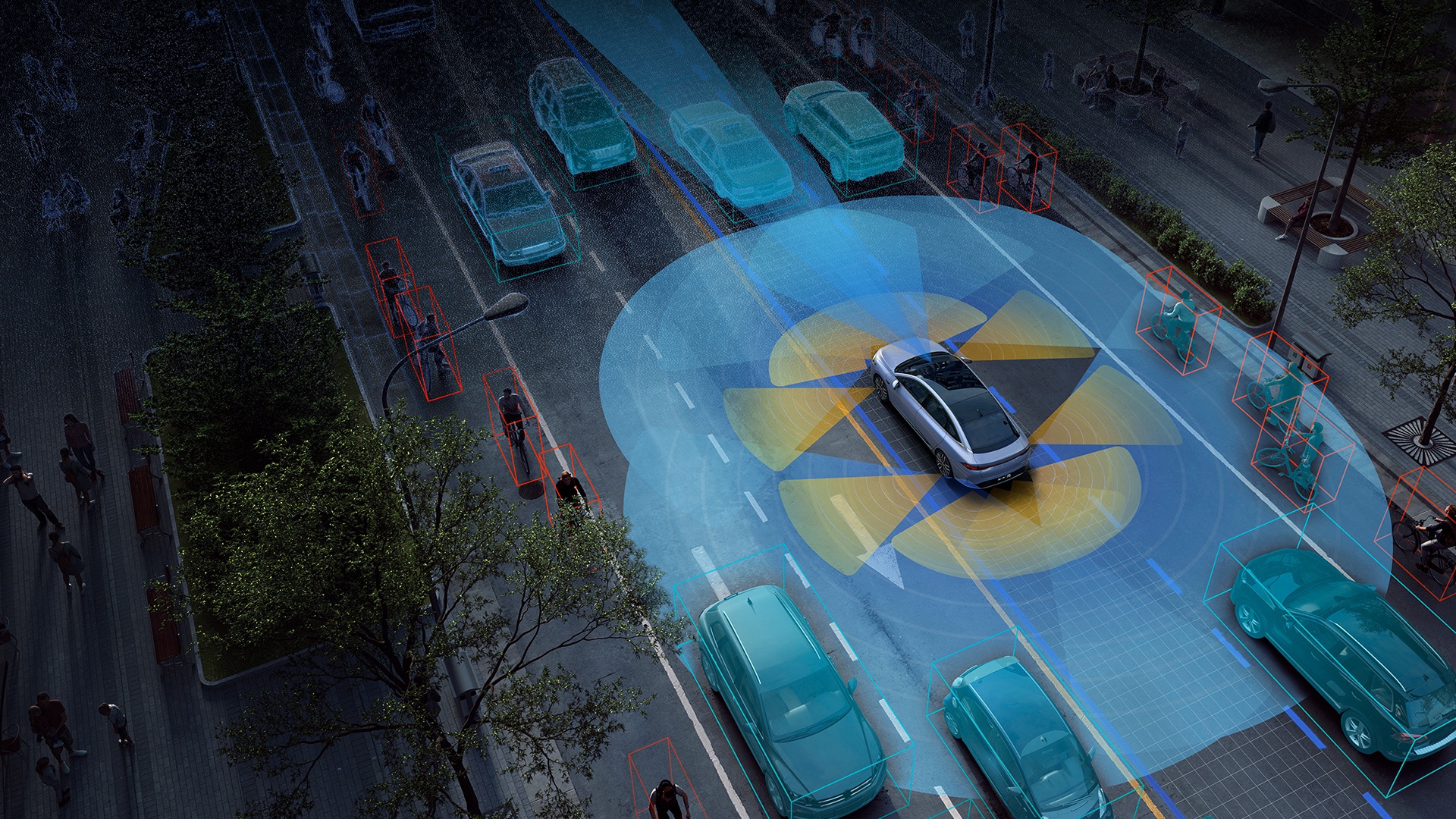
基于不同技術(shù)分類,車載雷達可以分為激光、超聲波、微波等各種不同雷達,基于不同的工作原理,汽車雷達又可以分為脈沖雷達、FMCW雷達、微波沖擊雷達等。這些實用的高科技配置,可以在車輛行駛過程中為我們提供更好的駕駛體驗的同時,提供更加強大的安全保障。
1、超聲波雷達:
通過超聲波發(fā)射裝置向外發(fā)出超聲波,再利用接收器接收反射回來的超聲波時間差來測算距離。
優(yōu)勢:成本低、穿透性強、防水、防塵等。
劣勢:容易受天氣情況影響,不同天氣的傳播速度不同,車速較快時誤差較大,另外就是超聲波散射角度大,不利于較遠距離的回收信號傳播;
2、毫米波雷達:
指工作頻段在毫米波頻段(30-300 GHz)的雷達。它是微波(300 MHz-300 GHz)的一個子頻段,測距原理跟一般雷達一樣,即把無線電波(雷達波)發(fā)出去,然后接收回波,利用障礙物反射波的時間差確定障礙物距離,利用反射波的頻率偏移確定相對速度。
優(yōu)勢:集成度高,受外界環(huán)境影響小,測量精度高:具備多目標連續(xù)跟蹤功能。波長短、頻帶寬(頻率范圍大),一般的探測距離在0-200米之間。穿透霧、煙、灰塵的能力強,具有全天候(大雨天除外)全天時的特點;抗干擾、反隱身能力優(yōu)。
劣勢:在雨、霧和濕雪等高潮濕環(huán)境的衰減,以及大功率器件和插損的影響會降低毫米波雷達的探測距離;相比微波,對密樹叢穿透力低;
3、激光雷達:
激光雷達的工作原理是通過激光發(fā)生器向目標發(fā)射激光束,然后根據(jù)從目標反射回來的波束與發(fā)射波束時間差比較,通過一系列數(shù)學(xué)算法和運算,可以得到目標的距離、方位、高度、速度、姿態(tài)、形狀等參數(shù),從而構(gòu)建3D環(huán)境感知圖(點云圖)。
優(yōu)勢:分辨率高,抗干擾能力強,性能綜合能力較高。
劣勢:自然光和熱輻射會消弱其功能,工藝要求高,成本高。
汽車雷達不響的處理方法:
1、遇到這種情況,如果單純只是因為電源接口和線路的問題,就比較好辦了。這個時候把接口插好,或者換一下線路就可以了。
2、蜂鳴器發(fā)生故障的情況下,一般很難維修,這個時候直接去買新的蜂鳴器就行。
3、保險杠處線路故障,可以去維修站維修。
一般來說,雷達不響差不多就是這種情況,只要大家在遇到故障不要著急,先快速排查故障,找到原因,才能針對解決。